publications
2026
- Design and Development of Fault Tolerant Lunar Satellite Network and Navigation ArchitectureS. AryanJun 2026
Space communication and navigation infrastructure has been a vital part in contributing to human civilization commercially and in achieving scientific endeavors in space exploration. The recent surge of attention towards the cislunar and lunar domains, along with scheduled missions until the next couple of decades, demands an understanding of space systems interactions for a sustainable, fault-tolerant lunar architecture. The LunaNet concept is a collaborative work between NASA, ESA and JAXA space agencies, representing the initial framework of interoperable standards and protocols for delivering communications and position, navigation, timing (CandPNT) services to users around the Moon. With LunaNet currently in the initial stages of the development phase, this thesis work aims to determine optimal CandPNT design architectures based on the communication and navigation performance of a stable Elliptical Lunar Frozen Orbit (ELFO) service constellation along with the Earth-Moon relay constellation models. The tradeoff space for the service constellations were explored with the sequential quadratic programming formulation and a multi-objective particle swarm heuristic search formulation to select diverse set of CandPNT designs. A simulation framework, termed SelenoNet, is designed to digitally model interactions within the CandPNT designs in a high-fidelity lunar environment to facilitate space network topology instantiation for emulating IP packets and BPv7 bundle transfers between lunar users and with Earth. Due to independent node instantiation of service satellites and users, SelenoNet can emulate satellite navigation broadcasts with Signal-In-Space errors (SISE) and clock errors to accurately determine precise point positioning for surface and orbiting lunar users. SelenoNet’s high-fidelity cislunar propagator is validated using the Ansys Systems Tool Kit (STK) High Precision Orbit Propagation (HPOP) solutions. The resultant optimal constellations’ CandPNT performance is evaluated and compared in SelenoNet to inform additional strategic performance for lunar surface ground stations, CandPNT design sensitivity and combinations of orbiting relay designs to maintain the quality of service (QoS).
- SpaceNet: A Resource-Efficient Simulation Testbed for LEO Mega-Constellation NetworksB. Barbour, Kedrowitsch A., Downs J., and 4 more authorsIEEE Access, Apr 2026
The rapid expansion of low Earth orbit (LEO) mega-constellations, such as SpaceX’s Starlink and Amazon’s Kuiper, aim to transform Internet access. These systems face substantial challenges due to the dynamic nature of LEO satellites, which result in frequent updates to network topologies. To support research into these challenges, we introduce SpaceNet, a resource-efficient testbed designed to emulate LEO mega-constellation networks and enable future experimental studies. Leveraging the Mininet framework, SpaceNet can efficiently simulate thousands of satellites, creating realistic network scenarios for testing and analysis. Our two-phase design enables fast, efficient simulation and emulated real-time, reducing hardware resource requirements while maintaining fidelity. We evaluate SpaceNet’s performance under an isolated ISL-only topology scenario, highlighting differences compared to real-world Starlink data. Additionally, we showcase SpaceNet’s resource profile by examining the impact of constellation size and routing interval on CPU utilization, memory usage, and real-time active network execution. SpaceNet enhances research into non-terrestrial networks, offering a scalable, open-source solution to address many research areas yet to be defined.
2025
-
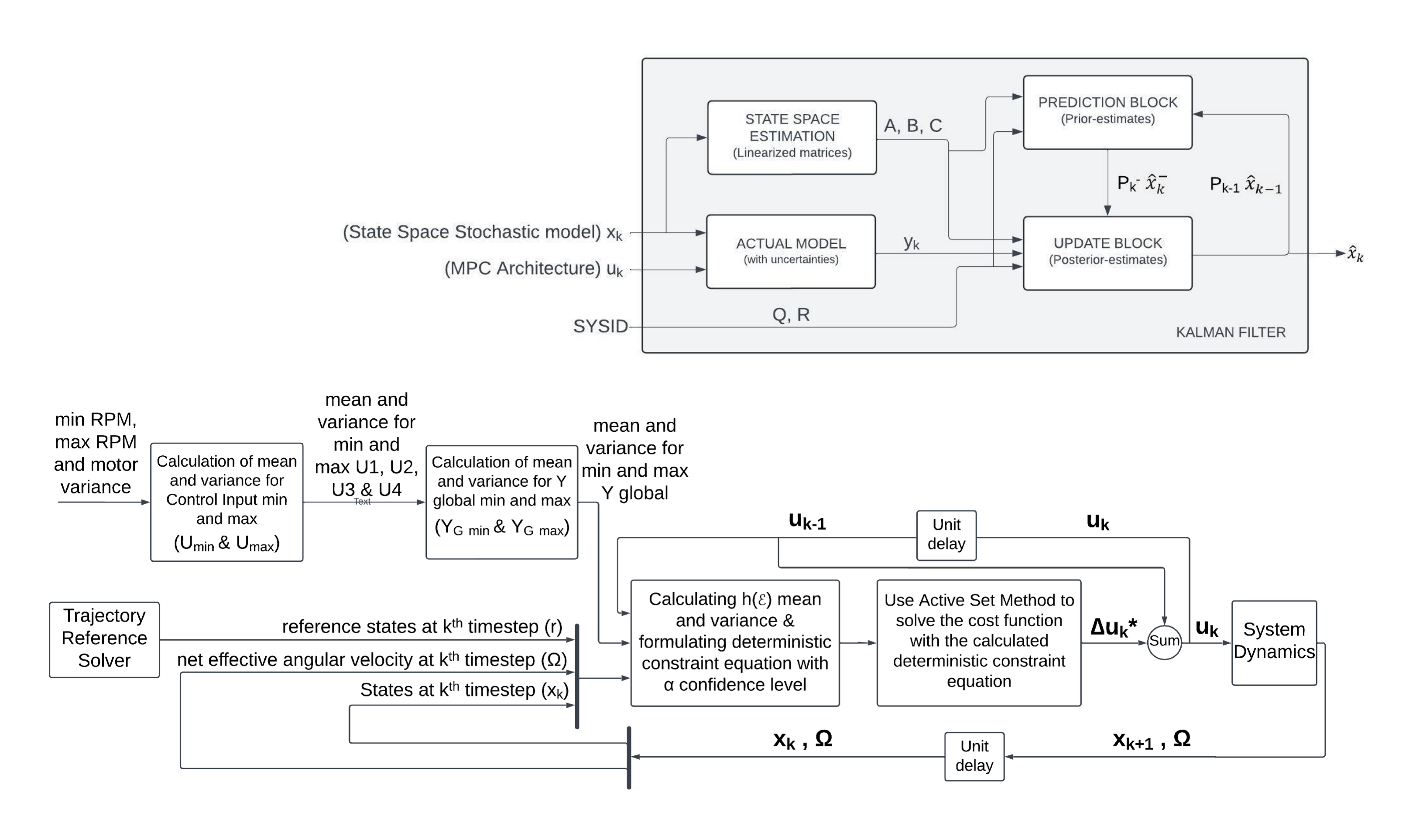 Reference tracking of nonlinear airborne systems using stochastic MPC with disturbance observers and actuator chance constraint optimizationS. AryanCEAS Aeronautical Journal, May 2025
Reference tracking of nonlinear airborne systems using stochastic MPC with disturbance observers and actuator chance constraint optimizationS. AryanCEAS Aeronautical Journal, May 2025With ever-growing advancements in the field of aerospace technology, there are much wider opportunities and capabilities emerging as a constant demand in terms of speed and accuracy. One of the major segments for any airborne mission is its Guidance–Navigation–Control technique which becomes very crucial for the aspects of speed and accuracy, especially for defense or highly complex missions such as missile launches, space missions, airstrikes, and many more. A controller technique that is much more accurate than its traditional counterparts like Proportional–Integral–Derivative (PID) Control and Linear Quadratic Regulator (LQR), as well as constantly considering any instantaneous state measurement noises into account, is an irresistible demand and advantageous over other control techniques in use. A Model Predictive Controller (MPC) can smoothly handle actuator constraints, angle-of-attack constraints, and pitch-angle constraints which makes it more versatile and near perfect for practical nonlinear systems. However, for a real system in addition to the inefficiencies in sensor readings, an actuator control input itself acts as a randomly distributed variable. Therefore, a robust control scheme is designed to leverage stochastic MPC’s optimal bounded control while considering the stochastic nature of the system’s states as well as the system’s actuators. As an example, a real-world quadcopter is mathematically modeled in its nonlinear state space representation cascaded with a nonlinear discrete Kalman filter with distinct covariances for both state and control measurements, to estimate the distribution of the quadcopter states. This is followed by the nonlinear model predictive controller which acts based on the system’s guidance requirements on the perturbated states at each time instance for optimal reference path tracking. The MPC’s overall prediction horizon cost function forms an un-deterministic optimization problem due to the probabilistic distribution of actuator values that is tackled via chance-constraint programming, followed by a unique implementation of the active set method to solve the problem for the entire prediction horizon. The performance of the proposed stochastic MPC solver is compared with a tuned PID controller for a stochastic quadcopter model where the proposed controller’s capability of bounded and smooth inner-loop and outer-loop tracking is highlighted compared to the PID’s discrete, inefficient performance in the presence of stochastic actuation. The supporting simulations for the proposed reference tracking technique are implemented in MATLAB/Simulink tool with numerical as well as graphical analysis results.
-
 Space Network (SpaceNet) Testbed - Development of a Multi-Functional Testbed for Simulating Space Communication NetworksJ. Downs, B. Barbour, A. Kedrowitsch, and 3 more authorsIn AIAA SCITECH Forum, 2025
Space Network (SpaceNet) Testbed - Development of a Multi-Functional Testbed for Simulating Space Communication NetworksJ. Downs, B. Barbour, A. Kedrowitsch, and 3 more authorsIn AIAA SCITECH Forum, 2025Low Earth Orbit mega-constellations make up a large portion of modern developments in space communications. The ability to simulate and properly research these complex systems is currently being developed to answer questions on the capabilities of the rapidly expanding industry. The development and improvement of a simulation-based platform for satellite network testing can help research efforts to enable industry and government entities to work together in the growing enterprise. The ongoing development of the SpaceNet Testbed is investigated, detailing its use of orbit-based constellation dynamics modeling, software-based emulation, and a hardware-in-the-loop integration design. An overview of the testbed’s software infrastructure design is described alongside details regarding the make-up of its hardware components. Use cases are presented comparing the differences in performance between the satellite network of an actual Starlink mega-constellation currently in orbit and a custom constellation with the same quantity of satellites, but with ideal node spacing and initial orbital positioning. Results of these use cases are then discussed, focusing on the latency of the data traffic and how it differs when varying the testbed’s user-defined configurations. In the future, resiliency testing and ground station to satellite link behavior analysis can be included into the testbed. The testbed has potential to help lead efforts in simulating complex space communication systems.
- LEO Satellite Network Testbed: MiniNet-based Emulation of Network Congestion and Routing DynamicsAryan S., Kedrowitsch A., Smith J., and 6 more authorsIn peer-review process, 2025
2024
-
 Four Body Invariant Structures And Chaos Analysis For Jovian Multi-Moon Ballistic TransfersS. Aryan and R. FitzgeraldIn AAS Astrodynamics Specialist Conference, Aug 2024
Four Body Invariant Structures And Chaos Analysis For Jovian Multi-Moon Ballistic TransfersS. Aryan and R. FitzgeraldIn AAS Astrodynamics Specialist Conference, Aug 2024@inproceedings{aryan2024jovian, title = {Four Body Invariant Structures And Chaos Analysis For Jovian Multi-Moon Ballistic Transfers}, author = {Aryan, S. and Fitzgerald, R.}, booktitle = {AAS Astrodynamics Specialist Conference}, year = {2024}, month = aug, }
2022
-
 SRGAN-TQT, an Improved Motion Tracking Technique for UAVs with Super-Resolution Generative Adversarial Network (SRGAN) and Temporal Quad-Tree (TQT)D. More, S. Acharya, and S. AryanIn Technical Papers - SAE Mobilus, May 2022
SRGAN-TQT, an Improved Motion Tracking Technique for UAVs with Super-Resolution Generative Adversarial Network (SRGAN) and Temporal Quad-Tree (TQT)D. More, S. Acharya, and S. AryanIn Technical Papers - SAE Mobilus, May 2022Unmanned Aerial Vehicles (UAVs) are gaining significant popularity due to wide-scale applications in civilian and military use. Unmanned Aerial Vehicles are most commonly used for surveillance. Object tracking is one of the most important things that an autonomous UAV has to perform. However, the accuracy of the object tracking model degrades when the object fades away to some distance or if the input images have low resolution. High-resolution cameras are expensive and increase the overall cost of the UAV. The concept of SRGAN-TQT (Super-Resolution Generative Adversarial Network - Temporal Quad-Tree), an improved object tracking pipeline for UAVs in the presence of low-resolution cameras or distant objects, provides a cost-effective solution with enhanced accuracy to perform object tracking. Implementation of Super-Resolution - Generative Adversarial Networks (SRGANs) and Temporal Quad-Tree (TQT) along with state-of-the-art object detection algorithms serve as the backend of the pipeline. This approach uses Deep Neural Network-based GANs to upsample images precisely. Temporal Quad-Tree (TQT) is a motion tracking technique that is an extension of the popular Quad-Tree segmentation algorithm. The Temporal Quad-Tree algorithm is present to reduce the computational complexity and give a highly reliable tracking algorithm. This consequently omits the requirement of a high-resolution camera for UAVs while increasing the object tracking capability.